ระบบเรดาร์
ระบบเรดาร์

เรดาร์ (อังกฤษ: radar) เป็นระบบที่ใช้คลื่นแม่เหล็กไฟฟ้าเป็นเครื่องมือในการระบุระยะ (range) , ความสูง (altitude) รวมถึงทิศทางหรือความเร็วในการเคลื่อนที่ของวัตถุ เดิมทีตั้งแต่ปี ค.ศ. 1941 คำว่า "เรดาร์" ในภาษาอังกฤษสะกดด้วยอักษรตัวพิมพ์ใหญ่ คือ RADAR และย่อมาจากคำว่า Radio Detection and Ranging อย่างไรก็ตามในระยะหลัง คำนี้ได้กลายเป็นคำทั่วไปในภาษาอังกฤษ เราจึงพบเห็นการสะกดด้วยตัวพิมพ์เล็กแทน สำหรับในสหราชอาณาจักร คำว่าเรดาร์ แต่เดิมถูกเรียกว่า RDF (Radio Direction Finder)
วิวัฒนาการ
ประวัติศาสตร์ของเรดาร์สามารถกล่าวย้อนไปตั้งแต่สมัยแรกเริ่มค้นพบคลื่นแม่เหล็กไฟฟ้า ในปี ค.ศ. 1886 Heinrich Hertz ได้สาธิตคุณสมบัติการสะท้อนของคลื่นวิทยุ ในปี ในปี ค.ศ. 1904 วิศวกรชาวเยอรมัน Hülsmeyer ประสบความสำเร็จในการทดลองตรวจจับเรือที่อยู่ทามกลางหมอกทึบได้สำเร็จ อย่างไรก็ตามเขายังไม่สามารถระบุตำแหน่งของเรือได้ ต่อมาค.ศ. 1917 นิโคลา เทสลาได้อธิบายหลักการใช้คลื่นแม่เหล็กไฟฟ้าในการตรวจจับและวัดความเร็วของวัตถ ในปี ค.ศ. 1922 Albert H. Taylor และ Leo C. Young แห่ง U.S.Naval Research Laboratory (NRL) สาธิตการตรวจจับตำแหน่งของเรือโดยใช้เรดาร์ และต่อมาในปี ค.ศ. 1930 Lawrence A. Hyland แห่งห้องทดลอง NRL เช่นกัน เป็นคนแรกที่สามารถตรวจจับเครื่องบิน(โดยบังเอิญ) โดยใช้เรดาร์ได้สำเร็จ จากความสำเร็จนี้ส่งผลให้มีการจดสิทธิบัตรเรดาร์ชนิด Continuous Wave (CW) ในปี ค.ศ. 1934
ประวัติศาสตร์ของเรดาร์สามารถกล่าวย้อนไปตั้งแต่สมัยแรกเริ่มค้นพบคลื่นแม่เหล็กไฟฟ้า ในปี ค.ศ. 1886 Heinrich Hertz ได้สาธิตคุณสมบัติการสะท้อนของคลื่นวิทยุ ในปี ในปี ค.ศ. 1904 วิศวกรชาวเยอรมัน Hülsmeyer ประสบความสำเร็จในการทดลองตรวจจับเรือที่อยู่ทามกลางหมอกทึบได้สำเร็จ อย่างไรก็ตามเขายังไม่สามารถระบุตำแหน่งของเรือได้ ต่อมาค.ศ. 1917 นิโคลา เทสลาได้อธิบายหลักการใช้คลื่นแม่เหล็กไฟฟ้าในการตรวจจับและวัดความเร็วของวัตถ ในปี ค.ศ. 1922 Albert H. Taylor และ Leo C. Young แห่ง U.S.Naval Research Laboratory (NRL) สาธิตการตรวจจับตำแหน่งของเรือโดยใช้เรดาร์ และต่อมาในปี ค.ศ. 1930 Lawrence A. Hyland แห่งห้องทดลอง NRL เช่นกัน เป็นคนแรกที่สามารถตรวจจับเครื่องบิน(โดยบังเอิญ) โดยใช้เรดาร์ได้สำเร็จ จากความสำเร็จนี้ส่งผลให้มีการจดสิทธิบัตรเรดาร์ชนิด Continuous Wave (CW) ในปี ค.ศ. 1934
วิวัฒนาการของเรดาร์ได้ก้าวไปอย่างรวดเร็วในช่วงกลางยุค 1930 มีการพัฒนาทั้งในสหรัฐอเมริกา บริเตนใหญ่ ฝรั่งเศส เยอรมนี รัสเซียอิตาลี และญี่ปุ่น ในสหรัฐอเมริกา R.M.Page แห่งห้องทดลอง NRL สามารถพัฒนาเรดาร์แบบใหม่ที่เรียกว่า Pulsed radar ได้สำเร็จในปี ค.ศ. 1936 ตั้งแต่ปี ค.ศ. 1938 เรดาร์ถูกเริ่มนำมาใช้ในการรบเป็นครั้งแรกใน SCR-268 ซึ่งเป็นระบบดักจับและทำลายเครื่องบินรบ (antiaircraft fire control system) และในปี ค.ศ. 1939 ระบบเรดาร์ SCR-270 ก็ถูกพัฒนาขึ้นสำหรับเป็นระบบเตือนภัยล่วงหน้า (early warning system) ระบบ SCR-270 เป็นที่รู้จักในนาม Pearl Harbor Radar เนื่องจากเรดาร์สามารถตรวจจับผู้บุกรุกได้ล่วงหน้า 30 นาทีแต่จากความผิดพลาดของผู้ปฏิบัติการทำให้เพิกเฉยต่อการเตือนของเรดาร์จนทำให้เกิดโศกนาฏกรรม Pearl Harbor ในที่สุด
ในส่วนของบริเตนใหญ่ เนื่องจากในช่วงนั้นถูกกดดันจากข่าวลือว่าเยอรมนีกำลังพัฒนาอาวุธใหม่ที่เรียกว่า death ray แม้ว่าท้ายที่สุดแล้วจะพบว่าอาวุธดังกล่าวไม่มีทางเป็นไปได้ แต่แรงกระตุ้นดังกล่าวทำให้นักวิทยาศาสตร์ชาวอังกฤษ Robert Watson-Watt สามารถคิดค้น Pulsed radar ได้สำเร็จและในปี ค.ศ. 1938 ถูกนำมาใช้ในระบบ Home Chain สำหรับป้องกันการโจมตีจากระยะไกล โดยระบบนี้ถูกใช้จนกระทั่งจบสงครามโลกครั้งที่ 2
ระบบเรดาร์ในช่วงก่อนปี ค.ศ. 1940 ใช้ความถี่ในย่าน HF และ VHFเป็นหลัก ต่อมาในปี ค.ศ. 1940 จากการที่อังกฤษและสหรัฐอเมริกาแลกเปลี่ยนเทคโนโลยีทางด้านเรดาร์ต่อกันทำให้มีการพัฒนาเรดาร์ที่ทำงานที่ความถี่ย่านไมโครเวฟได้สำเร็จ สำหรับประเทศอื่นๆ ที่มีการพัฒนาด้านเรดาร์เช่น ฝรั่งเศส และรัสเซียในช่วงนั้นก็ต้องชะงักเมื่อถูกรุกรานจากเยอรมนี สำหรับญี่ปุ่น การพัฒนาเทคโนโลยีด้านเรดาร์ในช่วงนั้นเป็นผลพวงจากการที่ญี่ปุ่นสามารถยึดเรดาร์ของสหรัฐได้ที่ฟิลิปปินส์ และการแลกเปลี่ยนเทคโนโลยีกับเยอรมนี ในตอนท้ายของสงครามโลกครั้งที่ 2 เทคโนโลยีเรดาร์ที่เป็นที่ยอมรับอย่างกว้างขวางในแง่ของประสิทธิภาพจึงเป็นเรดาร์ที่ทำงานที่ย่านความถี่ไมโครเวฟและเป็นแบบ pulsed radar[1]
ในยุคแรกๆ วิวัฒนาการเรดาร์ขับเคลื่อนไปอย่างรวดเร็วเนื่องจากเป็นเทคโนโลยีที่สำคัญทางการทหาร แต่ในปัจจุบัน เรดาร์ถูกนำมาใช้งานในชีวิตประจำวันมากขึ้น ได้แก่เรดาร์จับความเร็วรถยนต์ของตำรวจเพื่อตรวจจับผู้ขับขี่ที่ขับรถเร็วเกินตามที่กฎหมายกำหนด การวัดความเร็วลูกเบสบอลหรือเทนนิสในการแข่งขันกีฬา การใช้เรดาร์ในการพยากรณ์อากาศ ใช้นำทางเครื่องบินโดยสาร ใช้เป็นระบบเตือนการชนสิ่งกีดขวางของรถยนต์ ใช้ในระบบดาวเทียมเพื่อสร้างภาพถ่ายทางอากาศที่แสดงสภาวะของโลก เช่นสภาพป่า น้ำ มลภาวะ หรือการใช้ที่ดิน เป็นต้น
การประยุกต์ใช้งาน
ข้อมูลที่ให้โดยเรดาร์ประกอบด้วยทิศทางและระยะ (และก็คือตำแหน่ง) ของวัตถุจากสแกนเนอร์เรดาร์ จึงมีการใช้งานในหลาย ๆ ขอบเขตแตกต่างกันที่จำเป็นสำหรับการรู้ตำแหน่งดังกล่าวอันเป็นสิ่งที่สำคัญมาก เรดาร์ถูกนำมาใช้งานเป็นครั้งแรกเพื่อวัตถุประสงค์ทางทหาร: เพื่อค้นหาเป้าหมายทางอากาศ ทางภาคพื้นดินและในทะเล
หลักการและทฤษฏี
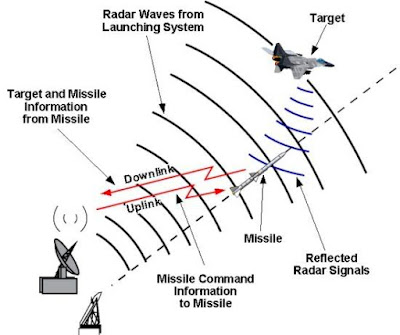
ระบบเรดาร์มีเครื่องส่งสัญญาณที่ปล่อยคลื่นวิทยุที่เรียกว่าสัญญาณเรดาร์ออกมาในทิศทางที่กำหนดไว้ เมื่อสิ่งเหล่านี้สัมผัสกับวัตถุพวกมันมักจะสะท้อนกลับหรือกระจายอยู่ในหลาย ๆ ทิศทาง สัญญาณเรดาร์ถูกสะท้อนกลับได้เป็นอย่างดีโดยเฉพาะอย่างยิ่งวัสดุที่มีสภาพนำไฟฟ้ามากโดยเฉพาะโลหะโดยส่วนใหญ่, โดยน้ำทะเล (seawater), โดยพื้นดินที่เปียก, และโดยพื้นที่ชุ่มน้ำ (wetlands) บางส่วนเหล่านี้ทำให้การใช้เรดาร์วัดความสูง (radar altimeters) เป็นสิ่งที่เป็นไปได้ สัญญาณเรดาร์ที่สะท้อนกลับไปสู่เครื่องส่งสัญญาณเป็นสิ่งที่พึงประสงค์ในการทำงานของเรดาร์ ถ้าวัตถุมีการเคลื่อนไหวอย่างใดอย่างหนึ่งที่ใกล้ชิดหรือห่างไกลออกไป จะทำให้เกิดการเปลี่ยนแปลงเล็กน้อยในความถี่ของคลื่นวิทยุ, ที่เกิดจากผลของปรากฏการณ์ดอปเปลอร์(Doppler effect)
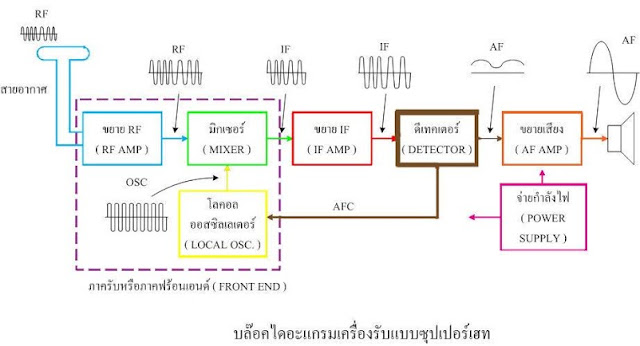
เครื่องรับเรดาร์มักจะถูกติดตั้ง แต่ไม่เสมอไปในตำแหน่งที่ตั้งเดียวกับเครื่องส่งสัญญาณ แม้ว่าสัญญาณเรดาร์ที่สะท้อนกลับที่ถูกดักจับโดยสายอากาศรับสัญญาณมักจะอ่อนมาก แต่สามารถขยายให้มีความเข้มขึ้นได้โดยเครื่องขยายอิเล็กทรอนิกส์ วิธีการที่ซับซ้อนมากขึ้นจากการประมวลผลสัญญาณยังใช้เพื่อกู้คืนสัญญาณเรดาร์ที่มีประโยชน์
การถูกดูดซึมอย่างอ่อน ๆ ของคลื่นวิทยุโดยสื่อตัวกลางที่มันเคลื่อนที่ผ่านไปเป็นสิ่งที่ช่วยให้ชุดเรดาร์ตรวจจับวัตถุที่ช่วงระยะสัมพัทธ์ที่ยาวขึ้น-ช่วงที่ซึ่งเป็นความยาวคลื่นแม่เหล็กไฟฟ้าอื่น ๆ เช่นแสง, รังสีอินฟราเรด, และ รังสีอัลตราไวโอเลต, ที่มีความเข้มมากเกินไปให้เจือจางลง
สมการเรดาร์
กำลัง Pr ที่จะย้อนกลับไปยังสายอากาศรับสัญญาณหาได้จากสมการ:

เมื่อ
- Pt = กำลังส่ง
- Gt = อัตราขยาย (gain) ของสายอากาศรับ-ส่ง
- Ar = ประสิทธิภาพของช่องรับพลังงานรังสี (พื้นที่) ของสายอากาศรับสัญญาณ
- σ = เรดาร์ภาคตัดขวาง (radar cross section) หรือค่าสัมประสิทธิ์การกระเจิงของเป้าหมาย
- F = รูปแบบปัจจัยการแพร่กระจาย
- Rt = ระยะทางจากเครื่องส่งไปยังเป้าหมาย
- Rr = ระยะทางจากเป้าหมายไปยังเครื่องรับ
- Clutter
- Jamming
การประมวลผลสัญญาณเรดาร์
การวัดระยะทาง
เวลาขนส่ง
วิธีหนึ่งที่จะใช้กับการวัดระยะทางจะขึ้นอยู่กับเวลาของเที่ยวบิน (time-of-flight): โดยการส่งผ่านคลื่นพัลส์สั้น ๆ จากสัญญาณวิทยุ (การแผ่รังสีแม่เหล็กไฟฟ้า) และวัดเวลาที่ใช้สำหรับการสะท้อนที่จะกลับมา
- Doppler Processing
- Detection
- Synthetic Aperture Imaging
เรดาร์ได้พัฒนาขึ้นระหว่างสงครามโลกครั้งที่ 2 เพื่อตรวจหาตำแหน่งและเส้นทางของเครื่องบินจากสถานีภาคพื้นดิน และใช้ในการนำทางในสภาพอากาศที่ไม่ดี RADAR ย่อมาจาก “Radio Detection And Ranging”เรดาร์เป็นระบบการตรวจวัดที่ต้องมีแหล่งของพลังงานที่มนุษย์สร้างขึ้น และส่งสัญญาณในช่วงคลื่นไมโครเวฟไปยังวัตถุเป้าหมายแล้ววัดความเข้มข้นของพลังงานที่กระจัดกระจายกลับ (Backscatter) ไปสู่เครื่องรับรู้ ซึ่งเป็นระบบการรับรู้แบบแอ็กทิฟ ดังนั้นการรับรู้หรือได้มาซึ่งภาพจากเรดาร์จึงสามารถถ่ายภาพได้ทั้งกลางวัน และกลางคืน ในทุกสภาพอากาศ ทะลุทะลวงเมฆได้
ระบบเรดาร์ถ่ายภาพในแนวเอียงซึ่งใช้สายอากาศที่ติดตั้งเชื่อมประจำที่บนเครื่องบินโดยชี้ไปทางวัตถุเป้าหมาย เรียกว่า เรดาร์มองข้าง (Side-Looking Radar : SLR หรือ Side-Looking Airborne : SLAR) ความละเอียดของเรดาร์ขึ้นอยู่กับขนาดของสายอากาศ ระบบเรดาร์จากห้วงอวกาศเริ่มขึ้นเมื่อปี ค.ศ. 1978 เมื่อสหรัฐอเมริกาได้ส่งดาวเทียม SEASAT และหลังจากนั้นก็มีการศึกษาระบบเรดาร์จากห้วงอวกาศโดยกระสวยถ่ายภาพจากเรดาร์ (Shuttle Imaging Radar : SIR) ต่อเนื่องตั้งแต่ปี ค.ศ. 1980 นอกจากนี้ได้มีการพัฒนาระบบเรดาร์บนดาวเทียมเรื่อยมาจนถึงปัจจุบัน เช่น ดาวเทียม ERS JERS ENVISAT RADARSAT และ ALOS เป็นต้น
ระบบการถ่ายภาพเรดาร์ประกอบด้วย เครื่องส่งสัญญาณ (Transmitter) เครื่องรับสัญญาณ(Receiver) อุปกรณ์อิเล็กทรอนิกส์ และคอมพิวเตอร์ เพื่อประมวลผลและบันทึกข้อมูล เครื่องส่งสัญญาณส่งพัลส์ของพลังงานไมโครเวฟเป็นช่วงเท่าๆ กัน และปรับระยะโดยจานตั้งฉากกับทิศทางคลื่นที่ลงสู่เป้าหมายเป็นมุมเอียง เมื่อคลื่นเรดาร์กระทบกับเป้าหมายสัญญาณจะกระจัดกระจายกลับไปยังเครื่องรับสัญญาณ ข้อมูลที่กระจัดกระจายกลับในแต่ละครั้ง ความเข้มของสัญญาณ เวลา และมุมที่ตกกระทบเป้าหมาย ที่ได้รับจากระบบรับรู้จะถูกคำนวณเพื่อบอกตำแหน่งของวัตถุเป้าหมาย ภาพเรดาร์ที่ประมวลผลจะเป็นความเข้ม (Strength) ของสัญญาณกลับซึ่งเป็นระดับความสว่างของภาพ



ความคิดเห็น
แสดงความคิดเห็น